

Krukas opnemer
We willen de krukas positie zo precies mogelijk meten. Dit doen we met behulp van een sensor, de krukas opnemer. Meestal is dit een VR sensor. Deze laten we kijken naar een triggerwheel. We positioneren de sensor op 0,5 tot 1,5mm van het triggerwheel. Normaal loodrecht op de tanden. In onderstaand voorbeeld staat de sensor haaks op de tanden.
Triggerwheel met HALL sensor in haakse opstelling
Triggerwheel
Het triggerwheel bestaat uit een wiel van ijzer. Neem geen aluminium of RVS. Hier reageert de sensor niet op. Het triggerwheel heeft een serie tanden waarvan er 1 of 2 missen. Bijvoorbeeld 36 tanden waarvan er 1 ontbreekt. We spreken dan over een 36-1 triggerwheel.

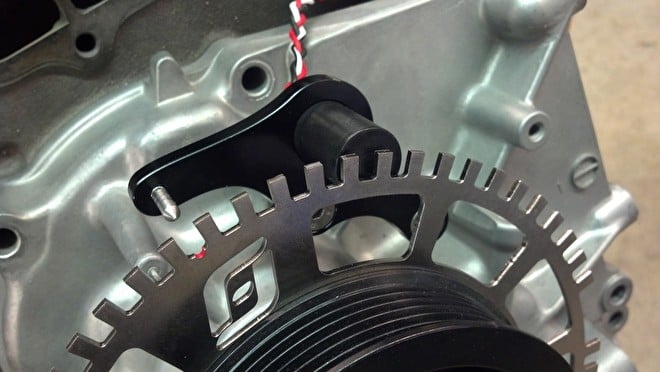
36-1 Triggerwheel
Door nu de missende tand in het systeem te definieren weet de ECU wanneer er een hele ronde is geweest en wat de hoek van de missende tand is ten opzichte van het Bovenste Dode Punt (BDP) van cilinder 1. Ideaal gezien plaatsen we de missende tand van het triggerwheel daar waar geen vonk gegeven zal moeten worden. In het gebied van de missende tand zal de ECU immers minder precies werken. Voor een viercilinder motor is een hoek van 60-120 graden dus uitstekend. Let wel: Eerst komt de missende tand, 60-120 graden later komt cilinder 1 op BDP.

De triggerhweel instellingen
Vanaf de missende tand kan de ECU de krukhoek uit gaan rekenen. Bij een 36-1 triggerwheel hebben we iedere 10 graden een tand. Als we nu echter op 25 graden voor het BDP een vonk willen maken dan ziet de ECU op dat moment geen tand. Ze rekent dan uit waar 25 voor het BDP zich bevind door de verstreken tijd te meten vanaf de laatste tand. Hoe meer tanden op het triggerwheel, hoe preciezer dit verloopt. De meest gebruikte standaarden zijn: 60-2, 36-1, 36-2 en 12-1. Belangrijk is dat het aantal tanden deelbaar moet zijn door het aantal cilinders en dat het een even aantal is. Een 5 cilinder kan je dus het best laten draaien op een 60-2 triggerwheel. Hebben we een motorfiets die 15.000 toeren draait, dan kan je beter het aantal tanden verminderen. Anders leest de sensor de tanden niet goed meer. Een veelgebruikte standaard voor motorfietsen is 12-1.
Het triggerwheel wordt gedecodeerd
Dit betekend dat iedere tand van het triggerwheel geteld word. Telt de ECU een onvolledig aantal (of teveel) tanden, dan wordt het proces onderbroken. De motor zal dan "hikken". Dit is een heel vervelende gedraging. Maar het wijst je op een fout. De ECU geeft het aan als een "sync loss". Door het proces te onderbreken zorgt de ECU ervoor dat er niet op een incorrect tijdstip een ontbranding plaats vindt. Er zijn veel systemen die een "sync loss" maskeren. De ontsteking kan bij deze systemen 10 of meer graden vroeger komen te staan dan de bedoeling was. Dit kan motorschade geven. Het decoderen van de krukashoek is dus heel belangrijk. Het zorgt voor een zeer precies ontstekingstijdstip en het geeft een heel duidelijk singaal op het moment dat er storing in het krukas signaal zit.
Triggerwheel alternatieven
Op sommige motoren zit er geen krukas pulley waar we een triggerwheel op kunnen bevestigen. Meten op de nokkenas is een slecht idee. De nokkenas draait maar de halve krukas snelheid en het ontsteking tijdstip zal hierdoor minder precies worden. Wat overblijft is een aanpassing aan het vliegwiel. In plaats van tanden kunnen we ook gaten boren. De sensor leest deze hetzelfde. Dus nu boren we bijvoorbeeld 58 gaten op 6 graden van elkaar. 2 tanden boren we niet. De sensor leest het wiel precies omgekeerd, maar dat kunnen we aanpassen door de sensor polariteit te wisselen.
